|
The Hong Kong university of Science and Technology, Guangzhou, China Email: zbi217@connect.hkust-gz.edu.cn |

|
|
|
I am interested in loco-manipulation, specifically for long-horizon mobile interaction with various objects (beyond simple table-top pick-and-place tasks), to alleviate human workload. Feel free to contact me if you are interested in working together! |
|
|
|
|
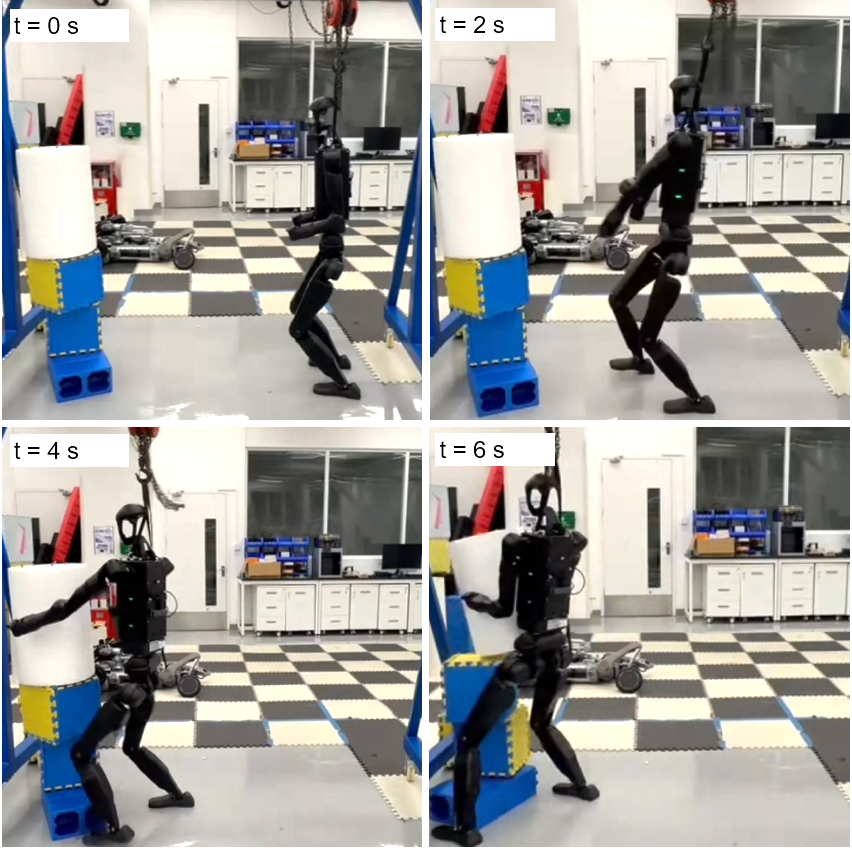
Zhihai Bi, Qiang Zhang, Guoyang Zhao, Jiahang Cao, Xueyin Luo, Yushan Zhang, Jinglan Xu, Ruoyu Geng, Yulin Li, Andrew F. Luo, Jun Ma Preprint, 2026 Humanoid-Object Interaction by Imitating Generated Videos. |
|
Zhihai Bi, Yushan Zhang, Kai Chen, Guoyang Zhao, Yulin Li, Jun Ma Submitted to TRO Autonomous Large-Object Rearrangement with a Legged Manipulator. |
|
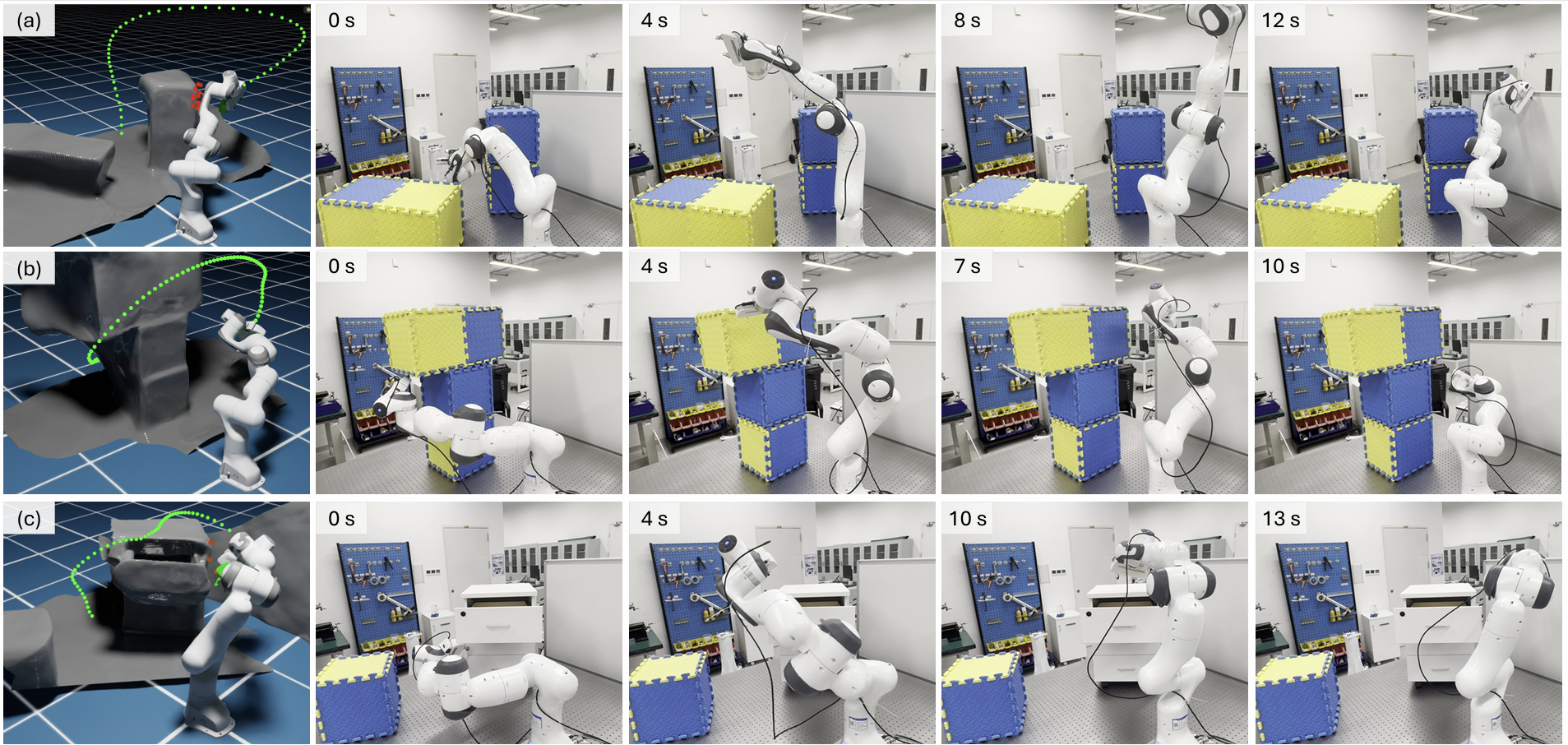
Yulin Li, Zhiyuan Song, Yiming Li, Zhicheng Song, Kai Chen, Chunxin Zheng, Zhihai Bi, Jiahang Cao, Sylvain Calinon, Fan Shi, Jun Ma Submitted to TRO Fast and safe trajectory optimization for mobile manipulators with neural configuration space distance field. |
|
Shuoye Li, Zhiyuan Song, Yulin Li, Zhihai Bi, Jun Ma Submitted to RA-L Online trajectory optimization for arbitrary-shaped mobile robots via polynomial separating hypersurfaces. |
|
Chunxin Zheng, Kai Chen, Zhihai Bi, Yulin Li, Liang Pan, Jinni Zhou, Haoang Li, Jun Ma ICRA , 2026 Embracing Bulky Objects with Humanoid Robots using WBC. |
|
Kai Chen, Zhihai Bi, Guoyang Zhao, Chunxin Zheng, Yulin Li, Hang Zhao, Jun Ma Submitted to T-Mech , 2025 Encodes the environment and the manipulator using signed distance field. |
|
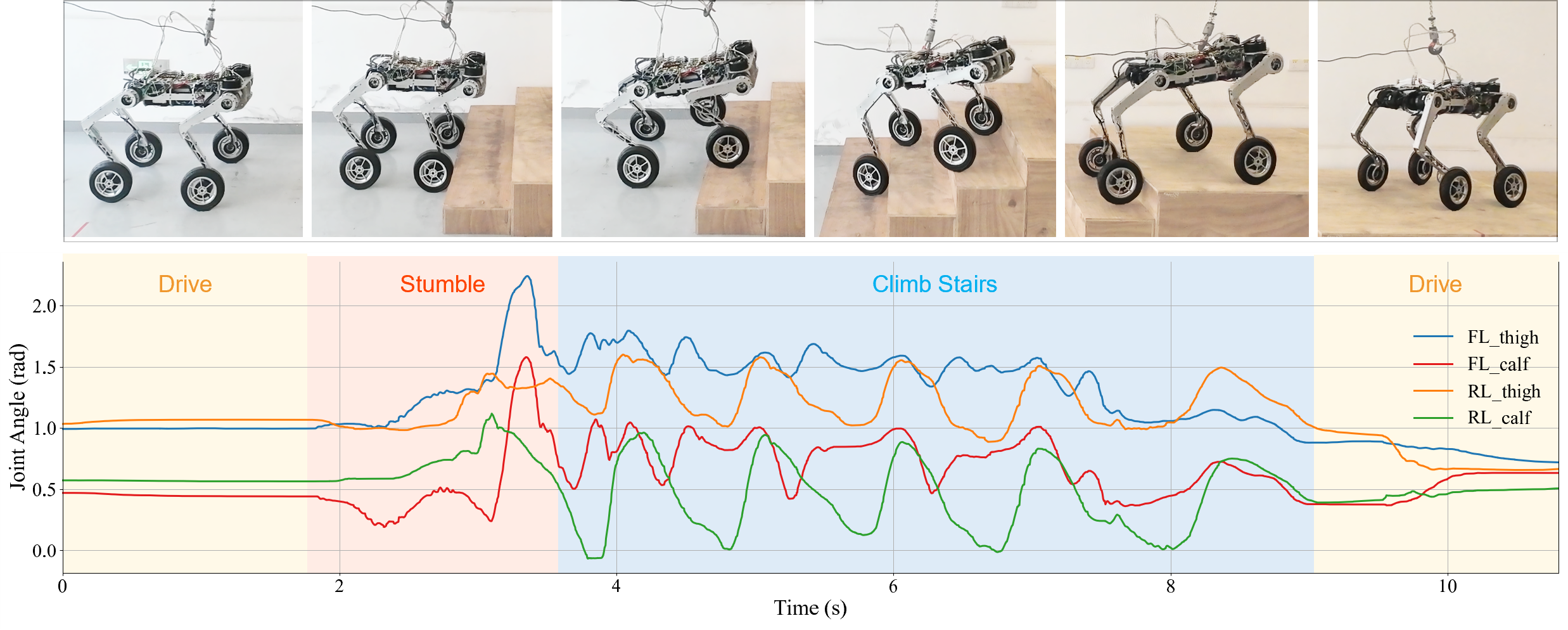
Zhicheng Song, Jinglan Xu, Chunxin Zheng, Yulin Li, Zhihai Bi, Jun Ma Submitted to RA-L , 2025 Design and RL locomotion for Reconfigured Wheel-Legged Robot |
|
Hongbin Fang, Qinyan Zhou, Zhihai Bi, Qiwei Zhang, Jian Xu The International Journal of Robotics Research (IJRR). Top , 2025 Accurate dynamics modeling for worm-like robot |
|
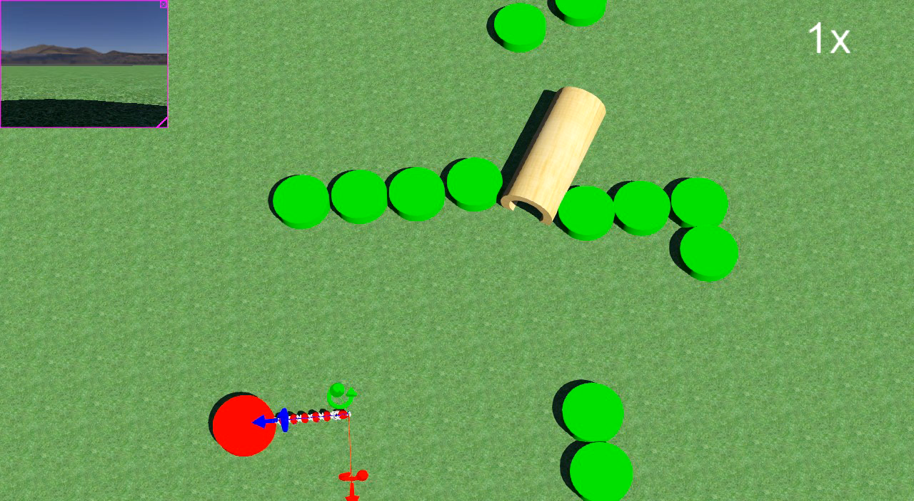
Zhihai Bi, Kai Chen, Chunxin Zheng, Yulin Li, Haoang Li, Jun Ma IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2025 Best Paper Award on Mobile Manipulation Best Student Paper Award Finalist Interactive navigation framework for legged manipulators, featuring an active arm-pushing mechanism |
|
Yulin Li, Zhicheng Song, Chunxin Zheng, Zhihai Bi, Kai Chen, Michael Yu Wang, Jun Ma IEEE Robotics and Automation Letters (RA-L), 2025 Robot navigation in cluttered and unknown environments with tree of free regions |

|
Chunxin Zheng, Yulin Li, Zhiyuan Song, Zhihai Bi, Jinni Zhou, Boyu Zhou, Jun Ma IEEE Robotics and Automation Letters (RA-L), 2025 Reactive Control for Mobile Manipulators with Whole-Body Safety in Complex Environments |
|
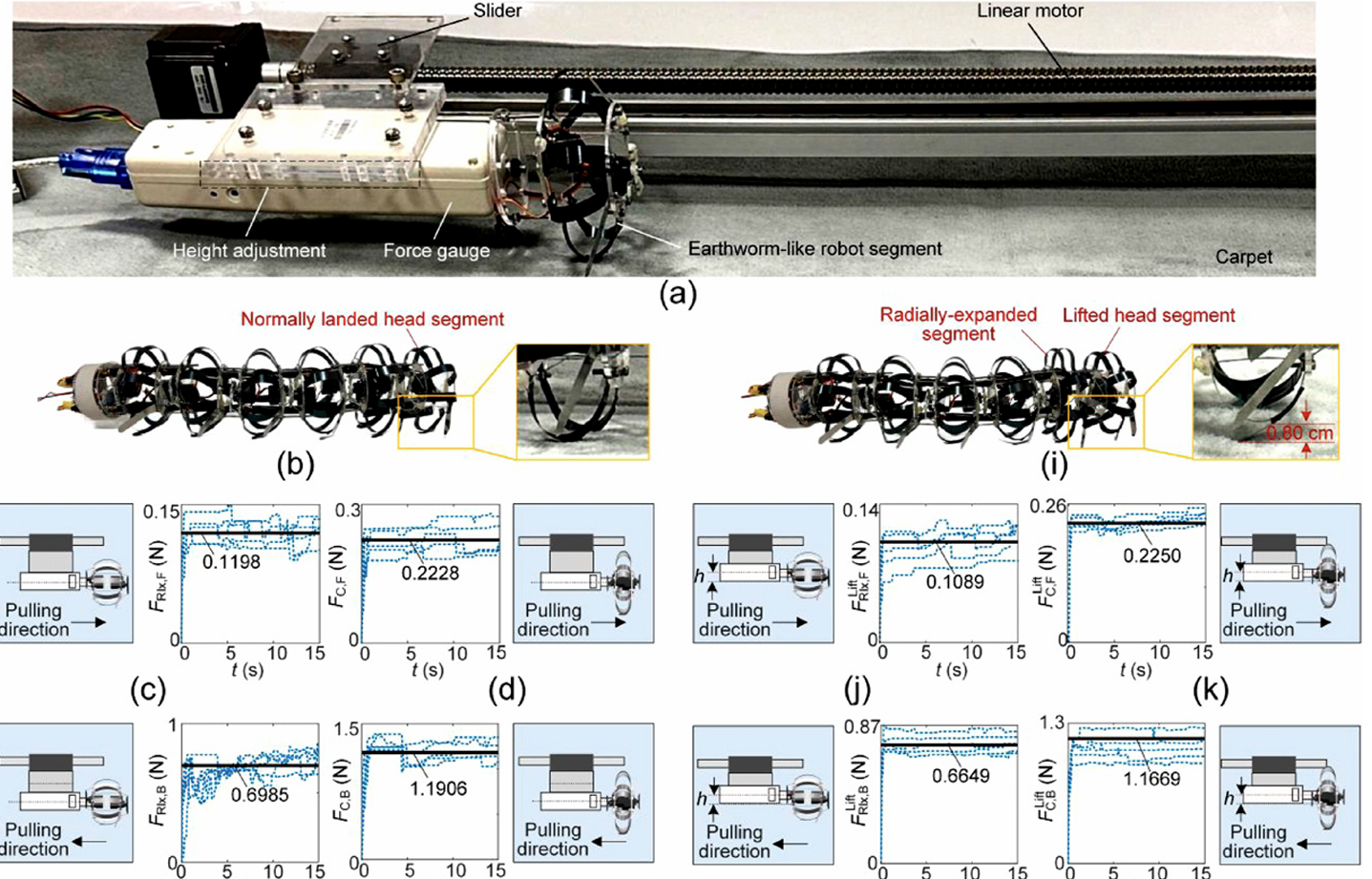
Zihan He, Qiwei Zhang, Zhihai Bi, Hongbin Fang IEEE/ASME transactions on mechatronics, 2024 A multimodal metameric earthworm-like robot |
|
Zhihai Bi, Qinyan Zhou, Hongbin Fang International Journal of Mechanical Sciences, Q1, Top , 2023 This paper presents a new design and prototype of a Worm-Snake-Inspired Metameric robot with multi-modal locomotion capability. |
|
Zhihai Bi, Jian Xu, Hongbin Fang IEEE International Conference on Robotics and Biomimetics (ROBIO), 2022 Path planning for the robot with multi-modal locomotion capability. |
|
T-RO, IROS, ICRA, RA-L, TIV, TIE |
|
|
|
2025
2025
Outstanding Graduate Student Award of Southeast University(TOP 3%),
2021
The 15th National Student Intelligent Vehicle Competition(2nd prize),
2020
The 10th University Robotics Competition, Jiangsu Province (1st place),
2019
Principal's Scholarship of Southeast University (TOP 1%),
2017-2018
Tang Zhongying Moral Education Scholarship (four consecutive years),
2017-2021
School Prize of Fudan University.
2021-2022
|
|
Copyright@Zhihai Bi 2023. Template is modified from Jonbarron and Wenchao Ding . |